|
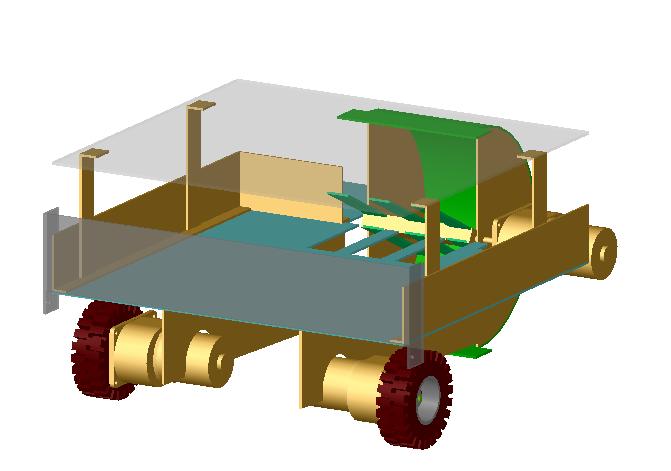
Image de synthèse en phase de conception avec un modeleur volumique
|
| Sommaire | Cahier des charges | Stratégie | Développement | Péda | Partenaires | Équipe | Déplacement | Épreuve | Photos | Presse | Autres défis | Courrier |
| Projet et stratégie |
|
Il a été décidé de créer un mobile de petite taille, se faufilant entre les balles, et ne ramassant que les balles blanches grâce à un système de relevage de type "moissonneuse-batteuse". Éléments roulants: deux roues motrices et une bille (roulette omnidirectionnelle) Motorisation: deux moto-réducteurs à courant continu (12 Volts), un sur chacune des roues Reconnaissance des balles: pas de reconnaissance, mémorisation des positions des balles blanches Stockage des balles: sur un plateau légèrement incliné vers l'avant et situé sur la partie supérieure du mobile Ramassage des balles: par un rotor d'axe horizontal, entraîné par un motoréducteur à cc 12 V Éjection des balles hors de la piste: par bennage (la benne supérieure, en pente, comporte à l'avant un portillon déverrouillage par un électro-aimant) Commande: par microprocesseur Alimentation: par piles
|
|
Image de synthèse en phase de conception avec un modeleur volumique
|